<ul id="auswy"></ul> 



 案例頻道
案例頻道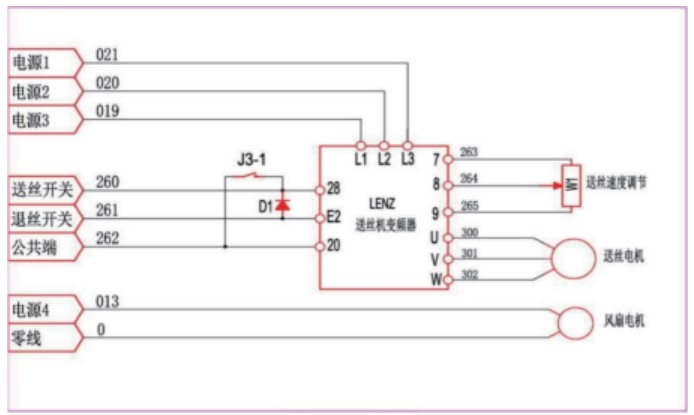
本研究圍繞雙向擺動(dòng)連鑄輥?zhàn)詣?dòng)堆焊機(jī)的電氣控制系統(tǒng)展開,旨在提高焊接工藝的控制精度和系統(tǒng)穩(wěn)定性。本研究通過選擇合適的可編程邏輯控制器(PLC)和伺服系統(tǒng),并采用高精度控制算法,確保了在焊接過程中實(shí)現(xiàn)對(duì)焊接溫度、焊絲進(jìn)給速度和焊縫位置的精確控制。實(shí)驗(yàn)結(jié)果表明,本研究所設(shè)計(jì)的系統(tǒng)在動(dòng)態(tài)響應(yīng)、焊接精度以及長時(shí)間運(yùn)行穩(wěn)定性方面均達(dá)到預(yù)期目標(biāo),具備較高的可靠性和抗干擾能力,為進(jìn)一步推廣應(yīng)用提供了技術(shù)保障。
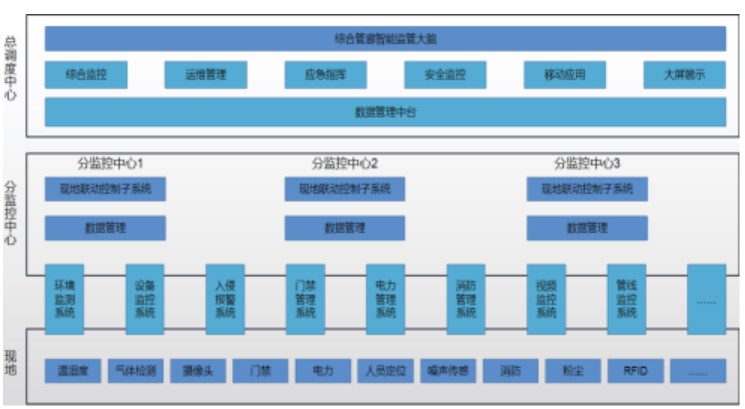
綜合管廊是保障城市運(yùn)行的重要基礎(chǔ)設(shè)施。本研究以物聯(lián)網(wǎng)、數(shù)字孿生、大數(shù)據(jù)、人工智能等信息技術(shù)為支撐,建設(shè)綜合管廊智能監(jiān)管系統(tǒng),助力提升了管廊管理運(yùn)行效能與安全水平,破解了綜合管廊一體化管理難題。本文針對(duì)綜合管廊智能監(jiān)管系統(tǒng)關(guān)鍵技術(shù)進(jìn)行分析,期望以數(shù)據(jù)驅(qū)動(dòng)管廊智慧化管理和推動(dòng)城市安全智慧運(yùn)行。
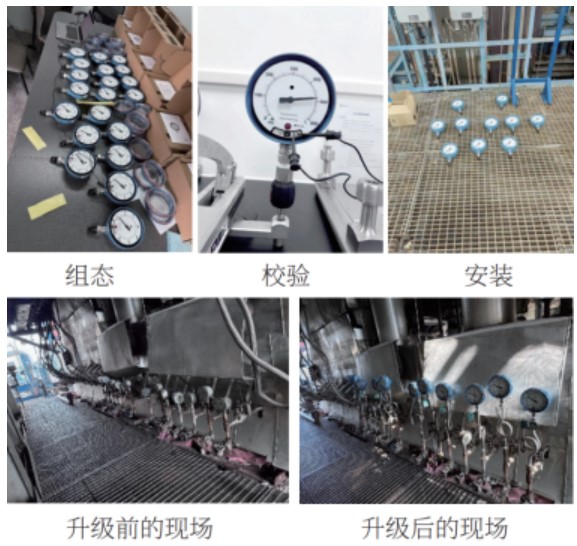
乙烯裂解爐是一種在爐管內(nèi)進(jìn)行烴類裂解反應(yīng)的關(guān)鍵設(shè)備,被譽(yù)為乙烯生產(chǎn)裝置的核心。其主要功能是將天然氣、煉廠氣、原油及石腦油等原材料,在爐管內(nèi)加熱至所需的高溫條件下,進(jìn)行裂解反應(yīng)生成裂解氣(如乙烯、丙烯等烯烴類產(chǎn)品),為后續(xù)生產(chǎn)提供基礎(chǔ)原料。
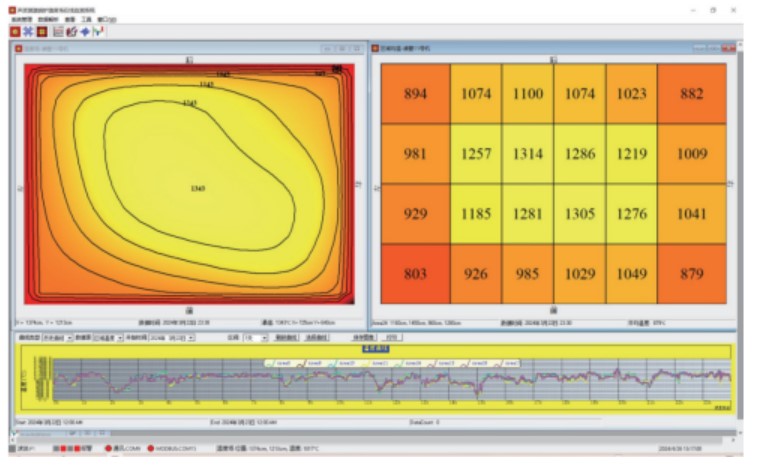
本文利用聲波鍋爐溫度場(chǎng)在線監(jiān)測(cè)系統(tǒng),對(duì)某電廠330MW汽包鍋爐燃燒狀況進(jìn)行了實(shí)時(shí)在線監(jiān)測(cè)。監(jiān)測(cè)結(jié)果表明,對(duì)鍋爐運(yùn)行過程中的燃燒偏差,在溫度場(chǎng)的輔助下,通過調(diào)整鍋爐二次風(fēng)各角配風(fēng),可實(shí)現(xiàn)燃燒偏差調(diào)整。鍋爐性能試驗(yàn)表明,該監(jiān)測(cè)系統(tǒng)減少了鍋爐燃燒偏差,穩(wěn)定了鍋爐運(yùn)行,提高了鍋爐燃燒效率,具有重要意義。

隨著當(dāng)前汽車行業(yè)競(jìng)爭(zhēng)逐步加劇,以及消費(fèi)者越來越追求產(chǎn)品個(gè)性化定制,企業(yè)不斷加大車型研發(fā)投入,逐步縮短車型的生命周期。這也導(dǎo)致汽車廠商需要布局更多的生產(chǎn)基地或在同一個(gè)生產(chǎn)基地生產(chǎn)更多的車型來滿足客戶需求,以增加企業(yè)的核心競(jìng)爭(zhēng)力。

隨著全球?qū)η鍧嵞茉葱枨蟮脑黾雍图夹g(shù)的進(jìn)步,鋰電池在電動(dòng)車、儲(chǔ)能系統(tǒng)和消費(fèi)電子產(chǎn)品中的應(yīng)用越來越廣泛,在制造過程中,通過賦碼和掃碼實(shí)現(xiàn)流程可追溯,不遺漏讀碼、不讀錯(cuò)碼是確保鋰電池品質(zhì)的重要一環(huán)。

本文基于電力供電企業(yè)配網(wǎng)專業(yè)技術(shù)人員在配電網(wǎng)日常運(yùn)維中的經(jīng)驗(yàn)與創(chuàng)新結(jié)合,將重合閘技術(shù)應(yīng)用于配電網(wǎng)箱式變壓器運(yùn)行維護(hù)中。利用10千伏重合閘技術(shù)原理研制的箱式變壓器低壓自動(dòng)重合閘裝置,通過技術(shù)改造,形成了具有重合閘功能的箱式變壓器,并在新疆博州縣市城區(qū)配電網(wǎng)中得到了廣泛應(yīng)用。結(jié)果證明,其減少了供電企業(yè)的配網(wǎng)運(yùn)維成本和電量損失,有效提升了配網(wǎng)供電可靠性,助力了配電網(wǎng)自動(dòng)化的升級(jí)轉(zhuǎn)型,也更好地服務(wù)了人民對(duì)美好生活的需求。

人工智能技術(shù)為優(yōu)化儲(chǔ)能系統(tǒng)的容量配置提供了新的解決方案。模塊化儲(chǔ)能柜能夠?qū)崿F(xiàn)更高效的電力管理,可以提升換電站的經(jīng)濟(jì)效益和系統(tǒng)穩(wěn)定性。本文深入分析了換電站電力負(fù)荷規(guī)律,基于峰谷電價(jià)差構(gòu)建了儲(chǔ)能系統(tǒng)容量配置優(yōu)化模型,利用LSTM網(wǎng)絡(luò)預(yù)測(cè)了電力負(fù)荷,并通過混合優(yōu)化算法實(shí)現(xiàn)了儲(chǔ)能系統(tǒng)的高效配置。實(shí)驗(yàn)驗(yàn)證了儲(chǔ)能系統(tǒng)在電網(wǎng)需求高峰和低谷條件下的響應(yīng)速度、穩(wěn)定性和經(jīng)濟(jì)效益。結(jié)果表明,采用人工智能技術(shù)的模塊化儲(chǔ)能柜能夠顯著提升換電站的運(yùn)營效率和經(jīng)濟(jì)效益。
FANUC 數(shù)控系統(tǒng)以其高質(zhì)量、低成本、高性能,得到了廣大用戶的認(rèn)可,在我公司得到了大量的使用,就其系統(tǒng)本身而言,經(jīng)受了連續(xù)長時(shí)間的工作考驗(yàn),故障率較低。而故障多發(fā)于外圍行程、限位開關(guān)等外圍信號(hào)檢測(cè)電路上。
由于空壓機(jī)是結(jié)構(gòu)復(fù)雜的通用設(shè)備,運(yùn)轉(zhuǎn)時(shí)間長,配備電機(jī)功率較大,因而降低空壓機(jī)的功耗,提高空壓機(jī)的經(jīng)濟(jì)運(yùn)行,對(duì)節(jié)能具有一定意義。盡管我們加強(qiáng)日常運(yùn)行管理:減少泄漏、合理潤滑、定期維護(hù),但是共蘊(yùn)藏的節(jié)能潛力遠(yuǎn)未被挖掘出來。
AI系列儀表中的人工智能控制算法,即對(duì)PID算法加以改進(jìn)和保留,加入模糊控制算法規(guī)則,并對(duì)給定值的變化加入了前饋調(diào)節(jié)。在誤差大時(shí),運(yùn)用模糊算法進(jìn)行調(diào)節(jié),以徹底消除PID飽和積分現(xiàn)象,如同熟練工人進(jìn)行手動(dòng)調(diào)節(jié)。
根據(jù)大量國內(nèi)并聯(lián)機(jī)器人文獻(xiàn),介紹了國內(nèi)并聯(lián)機(jī)器人的機(jī)構(gòu)學(xué)、運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)、控制策略以及仿真等方面的主要研究成果,并闡述了我國并聯(lián)機(jī)器人未來發(fā)展的方向以及尚待解決的問題。 關(guān)鍵詞:并聯(lián)機(jī)構(gòu);并聯(lián)機(jī)器人 Abstract: Based on many domestic literatures about parallel robot, this paper presents the primary research about the mechanism, kinematics, dynamics, control strategy and simulation of parallel robot. Meanwhile, it describes the development direction of parallel robot in the future and some problems that have not been solved in China.. Key words: Parallel mechanism; Parallel robot
由于計(jì)算機(jī)硬件以及網(wǎng)絡(luò)技術(shù)的高速發(fā)展,傳統(tǒng)的通訊方式如電話、傳真等由于無法達(dá)到“面對(duì)面”的溝通效果,不能滿足人們?nèi)找嬖鲩L的交流需求。視頻會(huì)議系統(tǒng)是支持人們進(jìn)行遠(yuǎn)距離實(shí)時(shí)信息交流、開展協(xié)同工作的應(yīng)用系統(tǒng)。
電話:010-62669087 控制網(wǎng)版權(quán)所有未經(jīng)許可不得轉(zhuǎn)載
地址:北京市海淀區(qū)上地十街輝煌國際5號(hào)樓1416室(100085)
版權(quán)所有 控制網(wǎng) 京ICP備14036844-2號(hào)  北京市公安局海淀分局備案號(hào):11010802023656號(hào)
北京市公安局海淀分局備案號(hào):11010802023656號(hào)

 官方微信
官方微信

